ESC靜電吸盤的工作原理
發佈時間:2026-01-23
點擊數:134
ESC靜電吸盤的覈心是利用靜電感應和電場力實現晶片和玻璃基板等薄工件的非接觸式精確固定。 本質上,它是一種可控的電容吸附系統,適用於真空和电浆環境等惡劣的電晶體工作條件。 同時,它通過不同的吸附機制適應各種工藝要求。
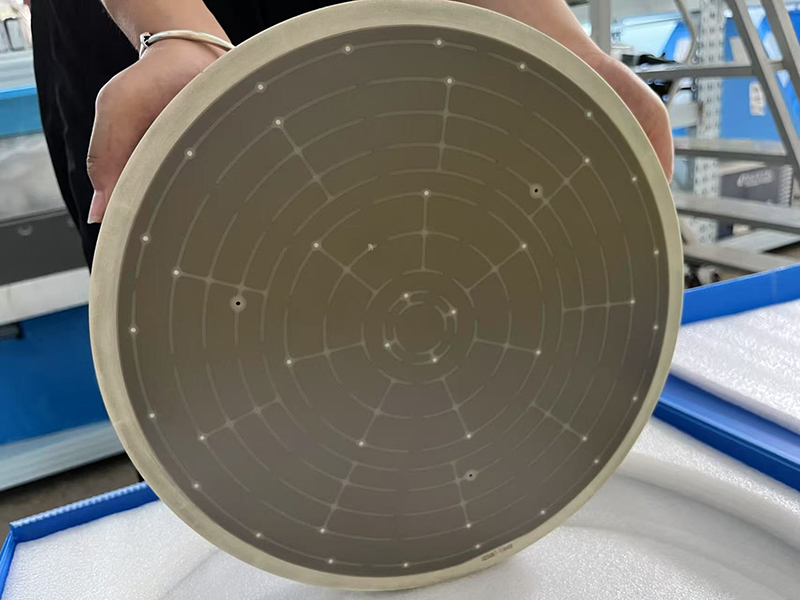
它具有三明治狀結構:底層是用於支撐和電路集成的基板,中間層由金屬電極(單極、雙極或多極)組成,表層覆蓋著由氮化鋁和氧化鋁等資料製成的絕緣導熱介電層。 在操作過程中,工件充當電容器的上板,內寘電極充當下板,介電層充當絕緣介質,形成完整的電容結構,為電場產生奠定基礎。
在實際應用中,吸附力主要來源於三種機制,每種機制都適應不同場景的需求。 首先是庫侖力吸附,適用於理想的絕緣介質層。 當施加高壓直流電壓時,電極產生電場,在工件背面感應出相反的電荷,由相反電荷產生的庫侖力實現吸附。 該機制提供均勻的吸附力,防止工件變形,適用於需要高平面度的工藝。 庫侖力的大小與介電常數、施加電壓和吸附面積呈正相關,與介電層的厚度呈負相關。 二是Johnson Rahbek(J-R)力吸附,主流工業機理,適用於摻雜電晶體介質層(具有弱漏電流)。 電荷在接觸表面的微小間隙中積累,形成微電場,合力為J-R力。 這種機制需要較低的電壓(500-800V),並產生更强的吸附力,可以克服氦氣冷卻的壓力,適應接觸表面的微小粗糙度。 第三種是梯度力吸附,常見於交替多電極排列的設計中。 正負電極形成非均勻電場,工件兩側的應力差產生單向合力。 通過優化電極間距和介電層厚度,可以增强吸附力,使其適用於特殊形狀的工件。
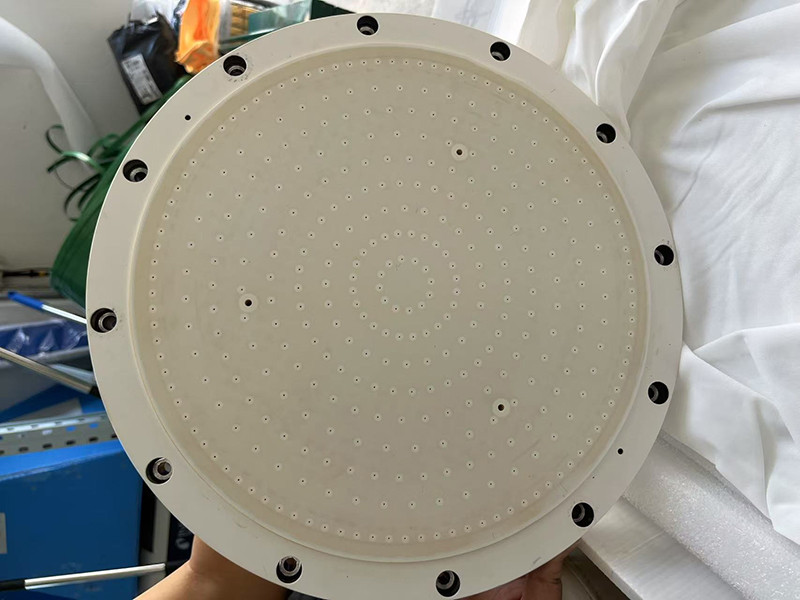
以電晶體蝕刻工藝為例,整個工作過程分為三個步驟,同時實現工件固定和溫度控制。 步驟1:工件定位——將晶片轉移到卡盤介電層的表面,並調整到裝配位置。 步驟2:靜電吸附——控制器向電極施加設定電壓(單極模式下工件充電需要电浆輔助,而雙極模式下工件直接極化),通過庫侖力或J-R力實現吸附。 吸附力必須大於背面氦氣冷卻壓力,以確保牢固固定。 步驟3:處理和釋放-在處理過程中,介電層導熱,通過將氦氣與內寘冷卻系統協調來調節晶片溫度。 處理後,切斷電壓並施加反向靜電消除電壓以消除殘留電荷並避免工件粘附,然後進行晶片轉移。
基於非接觸吸附原理,ESC靜電吸盤從根本上解决了傳統機械夾緊造成的劃痕和變形問題,以及超高真空環境下真空吸附失敗的問題。 同時,介電層的資料特性和多區電極設計使吸附過程中能够同步實現均勻的溫度控制,完美滿足电浆蝕刻、離子注入和薄膜沉積等覈心電晶體工藝對精度和穩定性的嚴格要求。